

신세호 Smart Mobility 팀장
(융합과학기술대학원 지능형융합시스템 전공 박사과정)
Q1. 수상 축하드립니다! 융합이야기 독자들과 수강 소감을 공유해 주시겠어요?
지난, 2013년 11일 전남 영암에서 국내 최초로 정부주도로 개최된 무인자율 주행 자동차 경진대회가 진행되었습니다. 이 대회에 참가한 'Smart Mobility팀'은 융합과학기술대학원 학생들과 융기원의 지능형자동차플랫폼센터 연구원들로 한팀을 이루고 있습니다. 홍성수 교수와 박재흥 교수의 지도하에 시스템 소프트웨어와 로봇 제어를 연구하는 총 9명의 연구원들이 모여 1년여를 준비한 끝에 대회를 치르게 된 샘이죠. 무인자율주행자동차 개발에 대한 경험이 전무하였지만 대회를 위한 많은 지원과 관심들 덕분에 우리팀이 첫 무인자동차 “SPIRIT 1”을 완성하고 대회에서 장려상을 수상할 수 있었던 것 같습니다.

▲ 서울대학교 융합과학기술대학원 Spirit1
Q 2. 이번 대회는 어떻게 진행 되었나요?
이번 무인자율주행 자동차 경진대회는 저가형 센서를 이용하여 상용화가 가능한 무인자율주행자동차 개발을 목표로 하고 있었습니다. 기존 대회에서 센서의 제한이 없었던 반면 이번 대회에서는 레이져 스캐너 2개, 스테레오 카메라 1개, 모노 카메라 1개, GPS 1개로 제한하여 미션들을 수행하도록 하였습니다.미션은 총 10가지로 정지신호를 인식하여 정지선에 정차하는 미션, 좌우 신호에 맞게 주행경로를 바꾸는 미션, 선행차량이 떨어뜨린 낙하물을 피하는 미션, 속도제한표지판을 인식하여 감속하는 미션, 복합장애물을 회피 주행하는 미션, 보행자 인식 미션, 공사장 바리게이트를 회피하는 미션, 2대의 정지차량 회피미션, 협로차선 미션, 교차로 미션 등으로 이루어졌습니다. 각 미션들은 경기장 내에 랜덤하게 배치되기 때문에 어떤 상황에서도 정확한 판단을 하고 정밀한 제어를 하는 것이 핵심이었습니다.
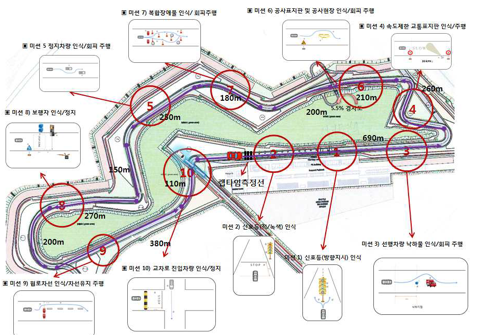
▲ 대회장소 모형과 미션
Q 3. 대회 당일의 실황을 듣고 싶습니다.
거센 바람이 부는 2013년 10월11일 오전 7시 주최측의 행사 준비로 분주한 가운데 각 팀들도 대회를 위한 사전 작업들을 시작하였습니다. 팀원들은 본인이 맡은 파트들을 점검하고 또 점검하며 좋은 결과를 기원하고 있었습니다. 대회 당일 팀장인 저의 마지막 임무는 무인자율주행차량을 출발선에 놓고 구동준비를 한 후 패트롤카에 탑승하여 경기 도중 발생할 수 있는 문제에 대처하는 것이었습니다. 차량 출발준비를 마친 뒤 패트롤카에서 출발 명령을 기다리는 시간은 그 동안 겪었던 어떤 시간보다 길었던 시간 같았습니다. 경기 시작과 함께 달리기 시작한 spirit은 10개의 미션 중 7개를 성공하고, 문제상황으로 인한 정차 없이 주행을 하였습니다. 1년동안 하나의 목표를 향해 달려온 지도교수님과 팀원들, 그리고 응원 와준 동료들의 환호 속에 코스인하며 마무리를 지었습니다.
▲ 대회 당일 1

▲ 박재흥, 홍성수 교수님과 Smart Mobility팀원들 단체기념사진
Q 4. 그동안 Smart Mobility 팀의 연구 과정을 들려주세요.
대회를 처음 준비하는 저희 팀으로서는 10개월가량의 짧은 시간 동안 차량 제작에서부터 무인자율 주행을 위한 핵심 기술들을 구현 해야 한다는 것 자체가 어려웠던 일이 아니었나 싶습니다. 이를 극복하기 위해 저희 팀은 세부적으로 세 분야로 나누어 매주 발표를 통해 선행 연구들을 면밀히 분석하여 개발 과정상의 오류를 최대한 줄일 수 있도록 노력하였습니다. 또한 대회에서 제시한 10개의 미션들을 통과하기 위해서는 다양한 조건 속에서 많은 실험을 하는 것이 매우 중요했습니다. 이를 위해서는 무인자동차를 이용한 실험을 위해 차가 없는 포장된 도로를 확보하는 것이 중요한 문제 중에 하나였습니다.도로 폭 12m이상으로 40km정도의 속도를 낼 수 있는 구간이 필요했기 때문에 적합한 위치를 선정하는 것이 어려운 문제였습니다. 팀원들과 발품하며 실험 장소를 물색하던 중 충북 음성의 혁신도시를 발견하게 된 것은 저희에게 큰 행운이었던 것 같습니다. 8월부터는 팀원들과 충북 음성에 있는 마을회관에서 숙식을 해결하며 새벽부터 밤까지 다양한 실험들을 했던 것들이 많은 추억으로 남습니다.

▲ 연구 과정
실험 장소로 사용했던 충북 음성의 혁신도시는 개발 중인 지역이라 주변에 건물들이 없어 식사할 곳뿐만 아니라 화장실도 없는 열악한 환경이었습니다. 실험 도중에는 식사하러 나가기가 어려워 먹을 것들을 사오면 길바닥에 신문지를 깔고 먹고 생리현상들은 자연 속으로 돌려보내며 점점 야생과 가까운 생활을 하던 모습, 그리고 여름 밤에는 차량의 불빛을 보고 달려드는 각종 벌레와 싸우던 모습, 대회를 앞두고 공사 차량들이 많아져 음성 꽃동네에 부탁 드리고 주차장에서 실험하던 일들이 생각납니다.

▲ Smart Mobility 팀 휴식시간
Q 5 . 무인자율주행자동차와 융합의 관계에 대해 어떻게 생각하시나요? 또한 앞으로의 연구 계획이 궁금합니다.
무인자율주행자동차 자체가 융합의 결정체라고 생각됩니다. 과거의 자동차 기술이 기계공학을 바탕으로 하였다면 현재는 전자, IT등 다양한 분야와 결합하여 차량의 인식 및 제어 시스템의 핵심적 기술들이 제작됩니다. 앞으로는 디자인과 인문학 요소와 결합하여 보다 인간과 소통이 가능한 무인자동차로 발전 할 수 있을 것이라 생각됩니다.
현재까지 많은 연구기관에서 개발되어오고 있는 무인자율주행 차량이 일반인들에게까지 오기 위해서는 복잡한 환경에서의 인식 및 판단 문제들이 남아있습니다. 특히 도심지 내에서는 GPS수신이 원활하지 못하여 차량의 위치인식에 어려움이 있고, 급변하는 교통상황과 돌발 상황, 눈 또는 비가 오는 상황에서의 인식 등의 어려움들이 있고 이를 위한 기술개발 및 해결책이 필요합니다. 저는 도심지 내에서 다중 물체 인식 및 추적 알고리즘 연구를 통해 복잡한 도심 상황을 인지 및 예측 할 수 있도록 하고자 합니다.
바쁘신 가운데 인터뷰에 응해주신 신세호 팀장님께 감사의 말씀 드립니다.


0 개의 댓글:
댓글 쓰기